下面我们将介绍为了实现结构紧凑、大减速比等特别目的而使用的齿轮机构。行星齿轮机构、少齿差行星齿轮机构、封闭行星齿轮机构。
17.1 行星齿轮机构
最单纯的行星齿轮机构如图17.1 所示。太阳齿轮 A、行星齿轮 B、内齿轮 C、及支撑行星齿轮并做公转运动的行星支架 D 这四个基本要素组成。
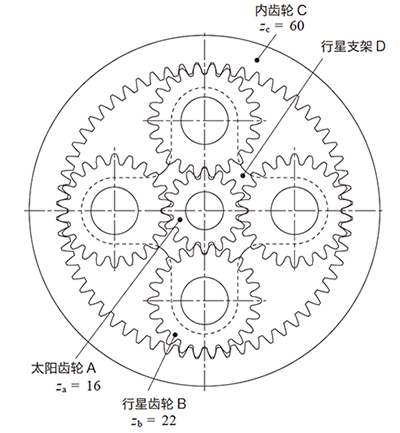
这种行星齿轮机构, 输入轴与输出轴可以配置在同一轴线上, 使用二个行星齿轮以分担负荷等, 因而可以使整个装置结构紧凑, 这些为其优点。
但是另一方面, 有构造的复杂性及内齿轮的干涉等比较难以对付的问题。图17.1 的行星齿轮机构中, 太阳齿轮 A 及内齿轮 C 和行星支架 D 拥有相同的中心轴线。
(1)行星齿轮机构的齿数条件
此机构中太阳齿轮 A(za)、行星齿轮 B(zb)、内齿 轮 C(zc)的齿数和行星齿轮的个数 N 之间要满足下列的三个条件。
条件 1
zc = za + 2zb(17.1)
这是保持中心距相等的必要条件, 称为同心条件。
因为此条件是针对标准齿轮而言, 通过对啮合中心距 a 进行调整, 亦可选择不满足此条件齿数的齿轮。
也就是说, 太阳齿轮 A 和行星齿轮 B 的中心距 a1行星齿轮 B 与内齿轮 C 的中心距 a2 必须相等。
a1 = a2(17.2)
条件 2

这是行星齿轮 B 对称地均匀配置在太阳轮与内齿轮之间时的必要条件, 称为封闭条件。行星齿轮 B 不均匀配置时, 则必须满足式(17.4) 的条件。
一般地说, 行星齿轮 B 只要满足下面的封闭啮合条件, 就可以配置。

其中θ : 相邻行星齿轮构成的半角( °)
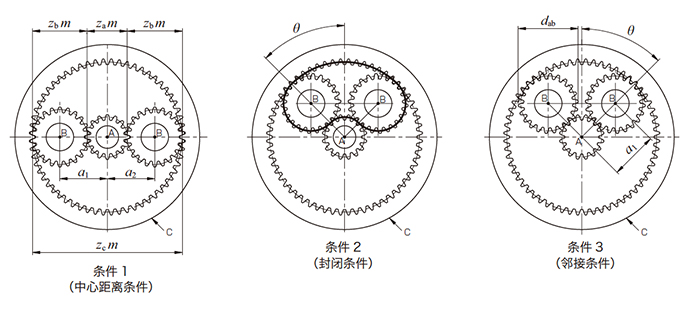
条件 3

这是保证行星齿轮间不得互相碰撞的必要条件, 称为邻接条件(外径干涉条件)。
因为是使用标准齿轮(全高齿) 均匀地配置时的条件, 所以, 在其他的情况下, 需要满足下式的条件。
dab < 2a1 sin θ(17.6)
- 其中
- dab
- :行星齿轮的齿顶圆直径
- a1
- :太阳齿轮和行星齿轮的中心距
满足了上述三个条件后, 还有行星齿轮 B 与内齿轮 C 的啮合时产生干涉的问题。
关于内齿轮的干涉问题, 内齿轮的计算(P609 - 611)中已经做了说明, 也就是说, 不能满足所有的这些条件,行星机构就不能成立。
(2)行星齿轮机构的传动比
改变行星机构中的固定要素, 就能改变传动比及旋转方向, 如图17.3 所示。
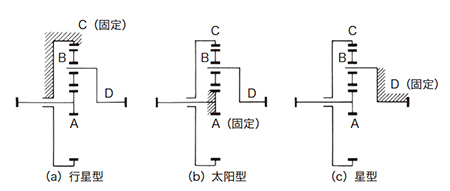
(a)行星型
行星型是内齿轮 C 固定型。
在这个类型中, 输入轴为太阳齿轮 A , 输出轴为支架 D 。根据数表法, 可以求出传动比。
| No. | 说明 | 太阳齿轮 A za |
行星齿轮 B zb |
内齿轮 C zc |
行星支架 D |
|---|---|---|---|---|---|
| 1 | 将支架固定后, 太阳齿轮A 旋转一周 |
+ 1 |

|

|
0 |
| 2 | 全体上胶后, 转动
|

|

|

|

|
| 3 | (1) + (2) 的合计 |

|
|
0 (固定) |

|
输入轴与输出轴旋转方向一致。
例如: za = 16、zb = 16、zc = 48 的话, 传动比为4。
(b)太阳型
太阳型是太阳齿轮 A 固定型。
当输入轴为内齿轮 C, 输出轴为支架 D 时, 求传动比。
| No. | 说明 | 太阳齿轮 A za |
行星齿轮 B zb |
内齿轮 C zc |
行星支架 D |
|---|---|---|---|---|---|
| 1 | 将支架固定后, 太阳齿轮 A 旋转一周 |
+ 1 |
|
|
0 |
| 2 | 全体上胶后, 转动 转动一周 |
− 1 | − 1 | − 1 | − 1 |
| 3 | (1) + (2) 的合计 | 0 (固定) |

|

|
− 1 |
输入轴与输出轴的旋转方向相同。
例如, 当 za = 16 、 zb = 16 、 zc = 48 时, 传动比为1.33333 。
(c)星型
星型是行星支架 D 固定型。
在星型机构中, 行星齿轮只进行自转没有公转。严格的讲, 应不属于行星机构。
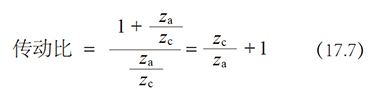
星形机构中, 当输入轴为太阳齿轮, 输出轴为内齿轮时的传动比为

也就是说, 行星齿轮做为惰轮( 空转轮) 对传动比不产生影响。
输入轴与输出轴的旋转方向相反。例如, 当 za = 16、zb = 16、zc = 48 时, 传动比为−3 。
17.2 少齿差行星齿轮机构
齿数差很小的内齿轮与正齿轮通过适当的变位后可以避免干涉的发生。设内齿轮的齿数 z2 = 50, 齿数差由1 到8 的齿轮要素, 列于表17.3。
| z1 | 49 | 48 | 47 | 46 | 45 | 44 | 43 | 42 |
| x1 | 0 | |||||||
| z2 | 50 | |||||||
| x2 | 1.00 | 0.60 | 0.40 | 0.30 | 0.20 | 0.11 | 0.06 | 0.01 |
| αw | 61.0605° | 46.0324° | 37.4155° | 32.4521° | 28.2019° | 24.5356° | 22.3755° | 20.3854° |
| a | 0.971 | 1.354 | 1.775 | 2.227 | 2.666 | 3.099 | 3.557 | 4.010 |
| εα | 1.105 | 1.512 | 1.726 | 1.835 | 1.933 | 2.014 | 2.053 | 2.088 |
对于这些齿轮, 不会发生渐开曲线干涉与次摆线干涉, 但是会发生齿形重叠干涉。所以, 将齿轮移动至啮合位置时, 需要沿轴方向进行移动。
少齿数差的变位内齿轮做为少齿数差行星齿轮机构使用时, 单级即可获得高传动比。
此时的传动比为:

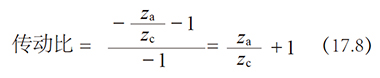
图17.4 中示意了z1 = 30、z2 = 31 的齿数差为1 的内齿轮与正齿轮的啮合。
此时, 传动比为-30。
17.3 封闭行星齿轮机构
已经在行星齿轮的齿数条件中有过说明, 象图17.2
的条件中所示的四个齿轮的啮合, 称为封闭行星机构
( 封闭啮合齿轮系)。封闭行星机构的特点是, 啮合封
闭在齿轮系中, 旋转一周后回到原来的位置。
此齿轮系中, 不能满足齿数条件的话, 齿轮的啮合就无法成立。
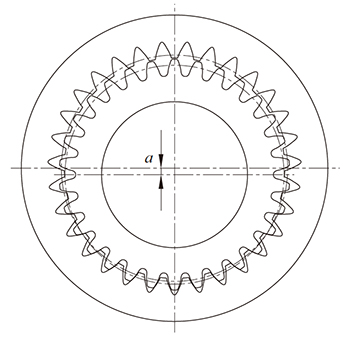
图17.5 中所示的封闭啮合中, 将成立的齿数分别设为 z1、z2、z3 。图中的粗实线所示部分的长度除以齿轮的齿距, 得出的数值为整数的话, 此封闭啮合成立。公式(17.11) 为啮合条件公式。

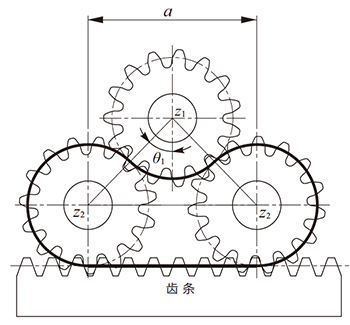
图17.6 示意了使用齿条的封闭啮合齿轮系。
图中粗实线部分的长度与齿轮齿距的商为整数的话,此封闭啮合成立。
公式(17.12) 为啮合条件公式。