- 首页 >
- 齿轮知识 >
- 学习运用齿轮的机械设计第一步 >
- 了解齿轮的旋转方向和旋转数
1. 齿轮的作用
机械设计中齿轮的作用一览表(表2-1)
表2-1 齿轮的作用| 齿轮的典型功能 | 説明 |
| 改变旋转轴的方向 | (已在第一讲说明过) |
| 把旋转运动变为直线运动 | (已在第一讲说明过) |
| 改变旋转方向(顺时针、逆时针) | 这一讲进行说明 |
| 改变旋转数(减速、增速) | 这一讲进行说明 |
| 改变旋转力量(增加扭矩、减小扭矩) |
通过多个齿轮的啮合,可以改变输入轴和输出轴的旋转方向以及旋转数。在这一讲,将对广泛使用的圆筒齿轮进行说明。
2. 旋转方向的定义
机电工程学的设计中使用到齿轮时,一般给动力源装配发动机。发动机的旋转方向即发动机轴飞速旋转时看到的轴的旋转方向。(图2-1)
顺便提一下,一般情况下,右转即为顺时针CW(Clock Wise),左转即为逆时针CCW(Counter Clock Wise)。
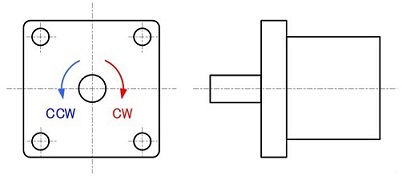
图2-1 发动机旋转方向的定义
作为机械设计师,在给电机设计师和软件设计师传达信息时,告知发动机的旋转方向是非常有必要的。
但是,与发动机不同,观察齿轮的角度发生变化,旋转方向的定义也会发生变化。向第三者用图说明机构的动作时,必须要统一看图的方向进行说明。(图2-2)

图2-2 在被指定的角度下所看到的齿轮旋转方向的定义

"CW,CCW是机电工程产品开发时经常出现的关键词,请务必牢记 !"
3. 速比(增速比,减速比)
使用齿轮的机械设计当中,通过多个齿轮的组合来实现所要求的旋转数的目的。
根据使用目的不同,可以使输出轴的旋转数与输入轴的旋转数相同, 或者用于减速、加速。
增速时扭矩(旋转力)会变小,减速时扭矩会变大。关于这点,我们将会在下一讲中说明。因此,一般情况下,通过使用齿轮减速来使发动机的较小输出获得较大扭矩。汽车零部件和家电产品,或者产业机械中的发动机多使用齿轮发动机。
齿轮发动机是指小型发动机和齿轮箱成为一体,通过降低旋转数来获得较大扭矩的电器部品。(图2-3)
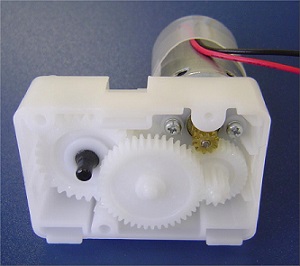
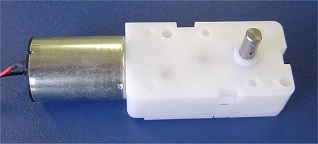
图2-3 齿轮发动机的构造
4. 1级齿轮传动的速比计算
齿轮的旋转数完全依存于相互啮合的齿轮齿数,按照计算的速比进行力量传达。
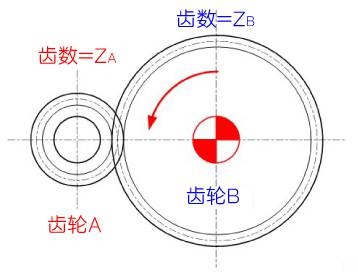
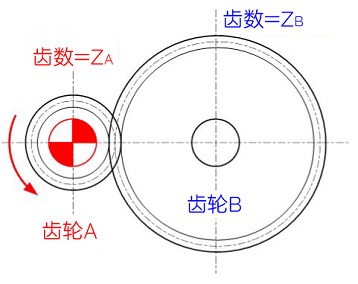
同一平面上啮合的齿轮副被称为1级齿轮传动,有以下计算公式。(图2-4)
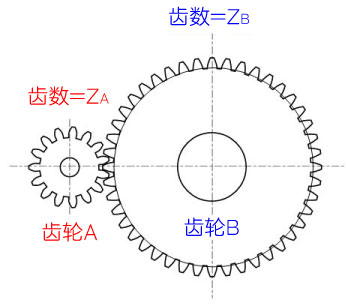
齿轮A在旋转数NA驱动时,将被减速成齿轮B的旋转数NB。
NB=(ZA/ZB)× NA
齿轮B在旋转数NB驱动时,将被加速成齿轮A的旋转数NA。
NA=(ZB/ZA)× NB
图2-4 1级齿轮传动的速比的计算公式
速比的练习题(1)
请回答从动齿轮齿轮A的旋转数和旋转方向。
 表示驱动齿轮。(图2-5)
表示驱动齿轮。(图2-5)
* rpm(revolution per minutes) : 每分钟的旋转数
* 另外,每秒钟的旋转数为rps(revolution per seconds)
[条件]
齿数分别为: ZA=20, ZB=40
驱动齿轮的旋转数: NB=125rpm
驱动齿轮的旋转方向: CCW
[解答]
齿轮A的旋转数
NA=(ZB/ZA)× NB= (40/20)× 125 = 250rpm
齿轮A的旋转方向是CW
图2-5 1级齿轮传动的速比练习题(1)
速比的练习题(2)
请回答从动齿轮(齿轮B)的旋转数和旋转方向。
表示驱动齿轮。(图2-6)
[条件]
齿数分别为: ZA=17, ZB=51
驱动齿轮的旋转数: NA=1800rpm
驱动齿轮的旋转方向: CCW
[解答]
齿轮B的旋转数
NB=(ZA/ZB)× NA= (17/51)× 1800 = 600rpm
齿轮B的旋转方向是CW
图2-6 1级齿轮传动的速比练习题(2)
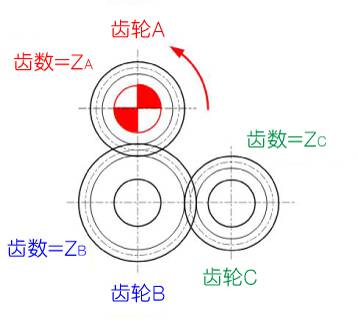
速比的练习题(3)
请回答从动齿轮(齿轮C)的旋转数和旋转方向。
表示驱动齿轮。(图2-7)
[条件]
齿数分别为: ZA=20, ZB=30, ZC=20
驱动齿轮的旋转数: NA=90rpm
驱动齿轮的旋转方向: CCW
[解答]
齿轮B的旋转数:
NB=(ZA/ZB)× NA= (20/30)× 90 ≈ 60rpm
齿轮B的旋转方向为: CW
NC=(ZB/ZC)× NB= (30/20)× 60 = 90rpm
齿轮C的旋转方向为: CCW
图2-7 1级齿轮传动的速比练习题(3)
但是,啮合齿轮的数量越是增加,计算也就越麻烦。(图2-8)
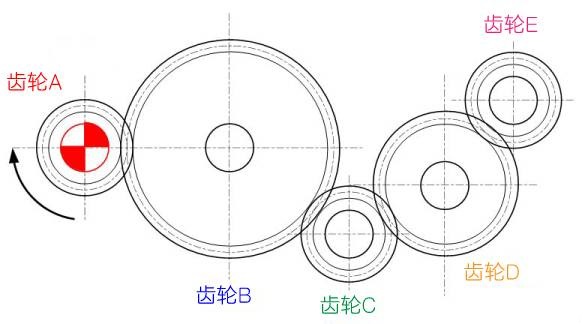
图2-8 1级齿轮传动的速比计算
不过,不用担心。
1级齿轮传动中很多齿轮啮合时,中间齿轮的数量和齿数对速比和转数不产生影响,仅仅由输入侧和输出侧的齿轮齿数决定。
因此,齿轮E的旋转数可以由以下公式得出:
NE=(ZA/ZE)× NA

" 1级齿轮副中啮合的齿轮数即使有所增加,但是计算依然轻松 "
5. 多级齿轮副的速比计算
啮合的齿轮副与轴向错开的齿轮副组成的传动机构被称为多级齿轮副。(图2-9)
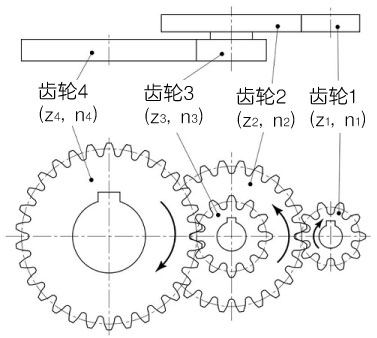
图2-9 多级齿轮副(2级齿轮副)
这时的速比计算比较麻烦,只能每级齿轮副逐个计算。
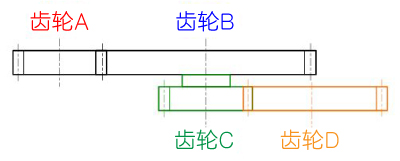
速比练习题(4)
请回答从动齿轮(齿轮D)的旋转数和旋转方向。
表示驱动齿轮。(图2-10)
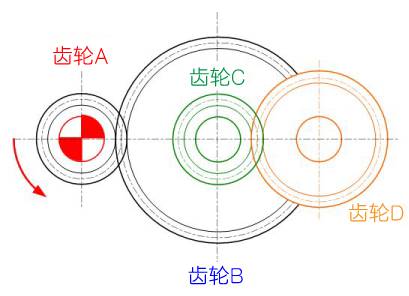
[条件]
齿数: ZA=20, ZB=40, ZC=20, ZD=30
驱动齿轮旋转数: NA=120rpm
驱动齿轮旋转方向: CCW
[解答]
齿轮B的旋转数:
NB=(ZA/ZB)× NA= (20/40)× 120 = 60rpm
齿轮B的旋转方向: CW
NC= NB= 60rpm (因为在同一个轴上)
齿轮C的旋转方向: CW
ND=(ZC/ZD)× NC= (20/30)× 60 ≈ 40rpm
齿轮D的旋转方向: CCW
图2-10 多级齿轮的速比练习题
通过1级齿轮副来实现更大减速比或者增速比的话,其中一个齿轮就得变得更大,齿轮机构的空间就得变得更大。想要有效使用较小空间的话,就不得不考虑多级齿轮传动。
从以上内容我们可以理解到,齿轮的旋转数依存于齿数比,可以通过计算得到。
下一讲,我们将对运用齿轮的机械设计中的一个重要因素—扭矩传递进行解说。(后续内容→)
插图:KAOSUN