非接触技术实现洁净、静音、安全的动力传输
什么是磁力联轴器?
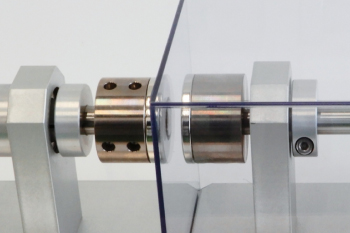
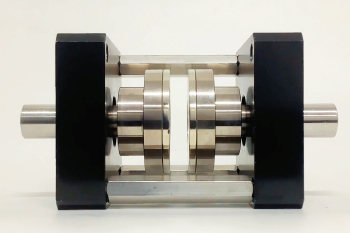
如左图所示,联轴器是一种用于连接两根轴并传递动力或旋转运动的机械部件。
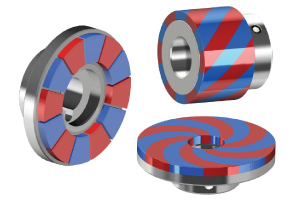
而右图所示的磁力联轴器则利用磁体之间的吸引力和排斥力来传递动力,使两根轴无需机械接触即可实现同步旋转。这种非接触式结构有助于减少磨损和润滑相关的问题,同时具备传统联轴器所不具备的独特特性。 这些特性能够在各种应用场景和运行环境中创造新的价值,相关内容将在后续章节中进行介绍。


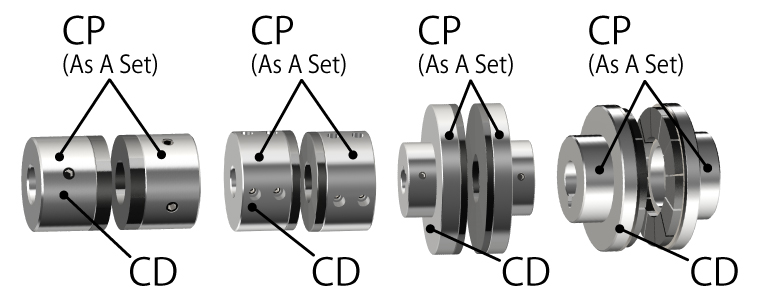
库存产品与定制产品
磁力联轴器是一种利用永磁体磁力,在输入轴与输出轴之间实现非接触式扭矩传递的机械元件。 由于动力通过磁体之间的吸引力和排斥力进行传递,而无需输入轴与输出轴之间的机械接触,因此不会产生接触面的磨损,也无需润滑。由此可实现低噪音、低振动运行,并大幅降低维护工作量。 一般来说,磁力联轴器以1:1的传动比传递扭矩,即输入轴与输出轴以相同转速旋转。此外,当负载超过其可传递的最大扭矩时,磁极之间的同步状态会失效并自动发生打滑(磁滑移),从而限制过大的扭矩传递。因此,磁力联轴器还具备内置的扭矩限制功能,可有效保护电机及机械设备免受过载损坏。
磁体材料:钕磁铁
表面处理:
磁体 - 电解Ni镀层
轭铁 - 无电解Ni镀层(SC材料)

标准库存品
| 型号(成套) | 型号(单品) | 参考图 | 尺寸 | 单品重量(g) | 最大传递扭矩(N·m) 与气隙 |
||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | B (尺寸) |
B (公差) |
C | D | E | F | G | 键槽宽度 (尺寸) |
键槽宽度 (公差) |
螺孔尺寸 | 1 mm | 5 mm | 10 mm | ||||
| DQ1010-02 | DE10-02 | SS | 10 | 4 | +0.018 0 |
10 | - | - | - | - | - | - | M2.5 | 6 | 0.031 | 0.007 | 0.0016 |
| DQ2020-08 | DE20-08 | S | 20 | 8 | +0.022 0 |
14 | 10 | - | - | - | - | - | M4 | 27 | 0.32 | 0.031 | 0.003 |
| DQ2525-08 | DE25-08 | 25 | 10 | 19 | 12 | - | - | - | - | - | M4 | 59 | 0.727 | 0.111 | 0.014 | ||
| DQ3030-08 | DE30-08 | 30 | 12 | +0.027 0 |
19 | 14 | - | - | - | - | - | M4 | 85 | 1.37 | 0.281 | 0.044 | |
| DQ3535-08 | DE35-08 | M | 35 | 12 | +0.027 0 |
24 | 16 | - | - | - | - | - | M4 | 151 | 2.215 | 0.568 | 0.112 |
| DQ4040-08 | DE40-08 | 40 | 12 | 24 | 16 | - | - | - | - | - | M4 | 206 | 3.511 | 1.046 | 0.244 | ||
| DQ5050-08 | DE50-08 | L | 50 | 12 | +0.027 0 |
24 | 20 | 14 | 9 | 30 | 4 | +0.1 0 |
M4 | 231 | 6.45 | 2.454 | 0.751 |
| DQ6060-08 | DE60-08 | 60 | 15 | 29 | 26 | 14 | 9 | 40 | 5 | M5 | 386 | 9.929 | 4.477 | 1.648 | |||
| DQ7070-08 | DE70-08 | 70 | 15 | 29 | 26 | 14 | 9 | 40 | 5 | M5 | 497 | 15.486 | 7.388 | 3.125 | |||
按订单生产品
| 型号(成套) | 型号(单品) | 参考图 | 尺寸 | 单品重量(g) | 最大传递扭矩(N·m) 与气隙 |
||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | B (尺寸) |
B (公差) |
C | D | E | F | G | 键槽宽度 (尺寸) |
键槽宽度 (公差) |
螺孔尺寸 | 1 mm | 5 mm | 10 mm | ||||
| DQ4545-08 | DE45-08 | L | 45 | 12 | +0.027 0 |
24 | 20 | 14 | 9 | 30 | 4 | +0.1 0 |
M4 | 191 | 4.595 | 1.598 | 0.434 |
| DQ5555-08 | DE55-08 | 55 | 15 | 29 | 26 | 14 | 9 | 40 | 5 | M5 | 337 | 7.621 | 3.178 | 1.167 | |||
| DQ6565-08 | DE65-08 | 65 | 15 | 29 | 26 | 14 | 9 | 40 | 5 | M5 | 439 | 12.614 | 5.942 | 2.346 | |||
| DQ7575-08 | DE75-08 | 75 | 15 | 29 | 26 | 14 | 9 | 40 | 5 | M5 | 558 | - | 9.309 | 4.165 | |||
| DQ8080-08 | DE80-08 | 80 | 15 | 29 | 26 | 14 | 9 | 40 | 5 | M5 | 624 | - | 10.589 | 4.755 | |||
| DQ100100-12 | DE100-12 | 100 | 25 | +0.033 0 |
39 | 42 | 18 | 15 | 60 | 8 | +0.2 0 |
M6 | 1199 | - | 25.317 | 10.602 | |
| DQ120120-16 | DE120-16 | 120 | 35 | +0.039 0 |
41 | 54 | 18 | 17 | 70 | 10 | M8 | 1653 | - | 47.343 | 18.636 | ||
| DQ150150-18 | DE150-18 | 150 | 50 | +0.039 0 |
51 | 76 | 18 | 21 | 100 | 16 | M12 | 3100 | - | 99.455 | 44.934 | ||
上述产品数据为常温环境下的数值。
磁力齿轮与磁力联轴器的主要特征
不会因齿面磨损而产生颗粒物 :

在传统齿轮中,由于齿面之间的直接接触,在某些情况下可能会产生微小的磨损颗粒。特别是在润滑条件不足时,产生磨损颗粒的可能性会进一步增加,颗粒产生量也会随之增多。在半导体制造设备等对洁净度要求极高的应用中,这些颗粒所造成的污染可能会对设备性能和产品质量带来不利影响。 相比之下,磁力齿轮通过非接触方式传递动力,齿面之间不会发生接触,因此能够从根本上消除因齿面磨损而产生颗粒的问题。因此,磁力齿轮特别适用于洁净室以及其他对污染极为敏感的应用场景。
无需润滑运行 :

传统齿轮通过齿面之间的直接接触来传递动力,因此在许多应用中都需要润滑。用户不仅需要选择合适的润滑方式和润滑剂,还需要管理润滑不足、定期更换润滑油等问题,从而增加维护工作量和运行成本。 在洁净室和真空环境中,还必须考虑润滑油飞溅、挥发、油雾产生、润滑脂放气(Outgassing)以及颗粒附着等额外问题。 相比之下,磁力齿轮通过磁力实现非接触式动力传递,无需对齿面进行润滑。这有助于减少维护需求、降低设备停机时间,并支持更加洁净的运行环境。
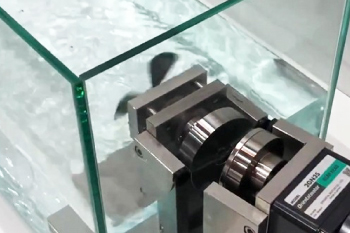
隔层传动可实现无密封结构 :


磁力齿轮在主动转子与从动转子之间无需物理接触即可传递扭矩。因此,动力可以穿过树脂、不锈钢等非磁性隔层进行传递,无需传统的轴贯穿结构或密封机构。 这一特性使其能够实现无轴封(Seal-less)结构。例如,在食品加工设备中,位于密封腔体外部的电机可以通过非接触方式驱动内部的搅拌部件,从而有助于降低污染风险并提高设备的清洁性。 此外,动力还可以传递至充满液体的容器内部,而无需在容器上开设贯穿孔,从而降低泄漏风险并简化整体系统结构。 需要注意的是,可传递扭矩会受到磁体间隙、隔层材料以及隔层厚度等因素的影响,因此在设计过程中应充分考虑这些条件。
非接触动力传输,实现低噪音与低振动 :

在机械设计中,降低传动系统的振动和噪音是直接关系到产品性能和附加价值的重要课题。传统齿轮通过齿面之间的机械啮合来传递动力,因此可能会受到啮合冲击、加工精度、装配误差以及润滑状态等因素的影响,从而产生振动和噪音。 相比之下,磁力齿轮通过磁场相互作用实现非接触式动力传递,齿面之间无需接触。因此,它能够抑制由齿面碰撞和摩擦引起的振动与噪音,与传统机械齿轮相比,有望实现更加安静、平稳的运行。 这一特性使其成为对低噪音、低振动以及稳定运行有较高要求的应用场景中的一种有效选择。
对偏角与偏心具有高容许度,装配更加容易 :

传统机械齿轮通过齿面的直接接触来传递动力,因此对装配精度要求较高。必须严格控制中心距、齿侧间隙(Backlash)以及齿面接触状态,否则可能导致异常磨损、齿面损伤、噪音增大以及振动加剧等问题。 相比之下,磁力齿轮通过非接触方式传递扭矩,能够容许一定程度的中心距偏差、角度偏差以及位置偏移,从而使装配与维护工作更加容易。 但需要注意的是,当磁极之间的空气间隙(Air Gap)过大时,可传递扭矩会下降,并可能发生失步(Slip)现象,即输入侧与输出侧无法保持同步运转。
过载时的磁力打滑有助于提升安全性 :

持久稳定的磁力性能 :

磁力联轴器的工作原理
磁力联轴器与传统联轴器不同,其无需输入转子与输出转子之间发生物理接触即可传递动力。相反,它利用永磁体(如钕磁铁)产生的磁力来传递动力。以下将介绍磁力联轴器的基本工作原理,并介绍理解其工作机制所需的关键技术术语。
1. 扭矩传递机制
为便于说明,以下将采用磁力联轴器的简化模型进行介绍。
磁力联轴器由一对转子组成,其圆周上交替排列着北极(N)和南极(S)磁极。这些磁极隔着气隙(Air Gap)相互作用,在异性磁极之间产生吸引力,在同性磁极之间产生排斥力。当输入转子旋转时,这些磁力将扭矩传递至输出转子,使两者无需任何物理接触即可实现同步旋转。
2. 同步旋转
磁力联轴器通常在输入转子和输出转子上采用相同数量的磁极。因此,输入转子与输出转子始终以 1:1 的传动比 实现同步旋转。
当施加扭矩时,两转子之间会产生后文所述的相位差(滞后运动)。这一相位差会产生传递扭矩所需的磁力,使磁力联轴器在保持同步旋转的同时实现扭矩传递。
如果传递扭矩超过磁力联轴器的最大可传递扭矩,两转子之间将失去同步,并发生相对滑移。这种滑移特性可用作过载保护功能,有助于保护机械设备免受过载损坏。
3. 气隙(Air Gap)
在磁力联轴器中,可传递扭矩取决于气隙(即两转子之间的距离)的大小。随着气隙增大,其中的磁通密度会降低,从而削弱两转子之间的磁相互作用(吸引力和排斥力)。因此,可传递扭矩也会随之降低。
因此,在使用磁力联轴器时,应综合考虑安装空间以及所需传递扭矩等因素,确保设置合适的气隙。

4. 滞后运动(Lost Motion)
什么是滞后运动?
在磁力联轴器中,滞后运动是指输入侧与输出侧之间产生的相位差(旋转位置偏移)。当磁力联轴器传递扭矩时,输入侧与输出侧之间会根据所施加的负载扭矩产生相位差。该相位差会产生一种磁性恢复力(即使相位差恢复为零的力),而正是这种恢复力实现了扭矩的传递。
零相位差
请参见图1。
为便于说明,以下采用简化的 8 极模型进行解释。在静止状态(扭矩为零)下,红圈标示的输入侧 S 极与输出侧 N 极正好相对,因此相位差为 0°。乍看之下,相位差为 0° 似乎意味着磁耦合最强,因此能够传递最大的扭矩。然而,实际情况并非如此。如前所述,磁力联轴器是在负载作用下,通过输入侧与输出侧之间产生相位差(滞后运动)来传递扭矩的。该相位差会产生传递扭矩所需的磁性恢复力。换句话说,当相位差为 0° 时,不会产生任何磁性恢复力,因此也就无法传递扭矩。

相位差与传递扭矩之间的关系
请参见图2。
为便于说明,本图对磁极几何形状和磁通分布进行了简化。在该 8 极模型中,一个磁极节距对应 45°(360° ÷ 8)。随着负载扭矩的增加,相位差会从 0° 逐渐增大。输入侧磁极(红圈标示的 S 极)会逐渐偏离与其正对的输出侧 N 极,同时逐渐接近相邻的输出侧 S 极。
因此,异性磁极之间的吸引力与同性磁极之间的排斥力会同时作用。这两种力共同产生一个使相位差减小的旋转扭矩,即磁性恢复力。
在这一简化的 8 极模型中,当相位差达到约 22.5°(即一个磁极节距 45° 的一半)时,吸引力和排斥力产生的合成旋转作用达到最大,从而产生最大的磁性恢复力。
因此,最大可传递扭矩出现在相位差约为 22.5° 时。
如果负载扭矩继续增大,磁耦合将无法维持,输入侧与输出侧之间将失去同步,从而发生磁极滑移(失步)。

关于滞后运动的注意事项
在实际运行过程中,相位差会随着负载扭矩的变化而不断变化。因此,在磁力联轴器的输入侧与输出侧之间,通常会始终存在一定程度的相位差。对于要求高定位精度或严格同步的应用,应充分考虑滞后运动所带来的影响。
总结
- 滞后运动是指输入侧与输出侧之间产生的相位差(旋转位置偏移)。
- 磁力联轴器通过利用相位差所产生的磁性恢复力来传递扭矩。
- 随着负载扭矩的增加,相位差及其所产生的磁性恢复力也会随之增大。
- 在本文所采用的简化 8 极模型中,当相位差约为 22.5° 时,可传递扭矩达到最大值。
- 当负载扭矩超过最大可传递扭矩时,将发生磁极滑移(失步)。
- 对于要求高定位精度的应用,应充分考虑滞后运动的影响。
- 与传统机械齿轮中的背隙(Backlash)不同,滞后运动是磁力联轴器实现扭矩传递所必需的工作特性。