- 首页 >
- 齿轮知识 >
- 齿轮技术资料 >
- 齿轮系的传动比和旋转方向
单一的齿轮无法进行动力传动。至少要有两个以上的齿轮相互啮合才能达到传动目的。
在这里, 首先从最单纯简单的单级齿轮机构、二级齿轮机构开始说明。
2.1 单级齿轮机构
一对齿轮啮合后而形成的齿轮系称为单级齿轮机构。单级齿轮机构如图2.1 所示。
设单级齿轮机构驱动齿轮的齿数为z1 , 转数为n1 , 被动齿轮的齿数为z2 , 转数为n2 , 传动比的计算方程式如下:
传动比 = z2 / z1 = n1 / n2(2.1)
根据传动比的数值, 可将单级齿轮机构分为三类:
传动比 < 1 增速齿轮机构 n1 < n2
传动比 = 1 等速齿轮机构 n1 = n2
传动比 > 1 减速齿轮机构 n1 > n2
图2.1 (A) 和(B) 的外齿轮啮合的单级齿轮机构中, 驱动齿轮与被动齿轮的旋转方向相反。
图2.1(C)的外齿轮与内齿轮相啮合的情况下, 转向相同。
图2.1(D) 的蜗杆蜗轮啮合的情况下, 旋转方向随螺旋方向而变化。
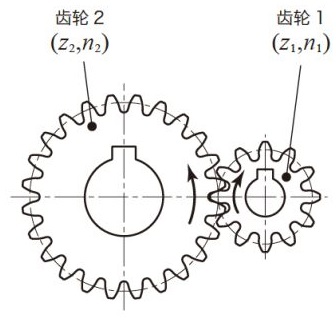
(A) 正齿轮组合
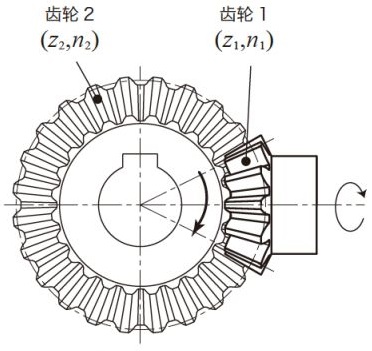
(B) 锥齿轮组合
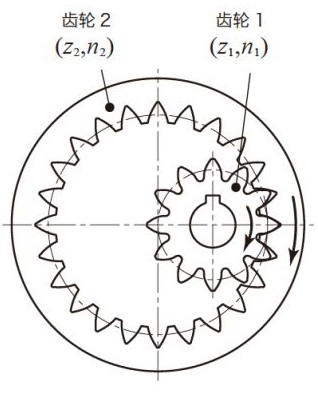
(C) 正齿轮与内齿轮
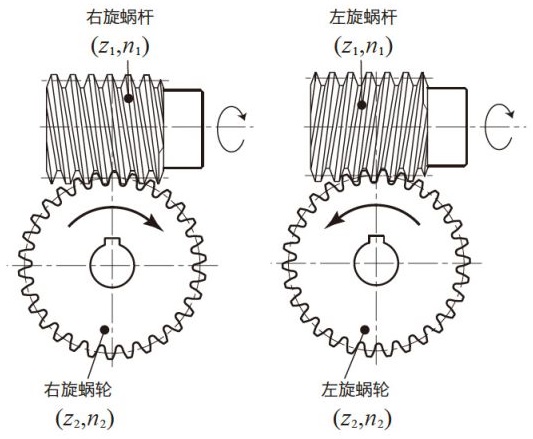
(D) 蜗杆蜗轮
图2.1 单级齿轮机构
除此之外, 还有使用了齿条的单级齿轮机构。在这个单级齿轮机构中,小齿轮的齿数为z1 的的话, 小齿轮在旋转θ 角度后, 齿条移动量ℓ 的数值可根据下式进行计算:
ℓ = z1θ / 360 × πm(2.2)
公式中的πm 为齿条的分度齿距。
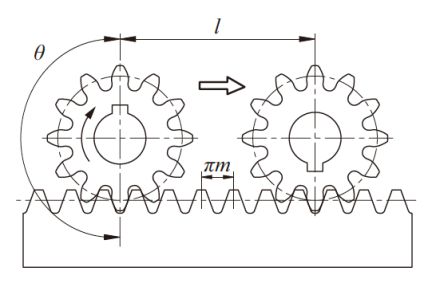
图2.2 小齿轮和齿条
2.2 二级齿轮机构
二级齿轮机构是使用了二组单级齿轮机构所构成的。图2.3 示意了二级齿轮机构的构造。
在这里, 如果设第一级的齿轮1 为驱动齿轮的话, 此齿轮机构的传动i 可由(2.3) 式表示。
传动比 i = z2 / z1 × z4 / z3 = n1 / n2 × n3 / n4(2.3)
其中 n2 = n3在这个二级齿轮机构中, 齿轮1 和齿轮4 的旋转方向相同。
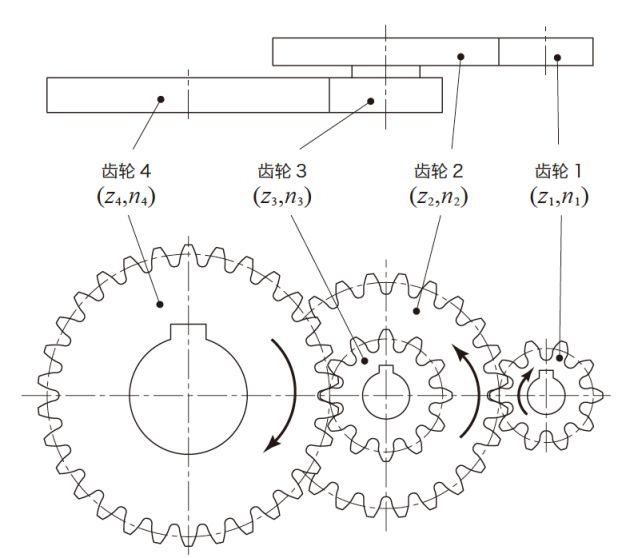
图2.3 二级齿轮机构
如果机构中的齿轮2 与齿轮3 的齿数相等时, 就将变成图2.4 所示的机构。
在图2.3 的机构中, 齿轮2 对传动比不产生影响, 变成了惰轮( 空转轮)。
因此, 可以将此机构看成是使用了惰轮的单级齿轮机构, 其传动比i :
传动比 i = z2 / z1 × z3 / z2 = z3 / z1(2.4)
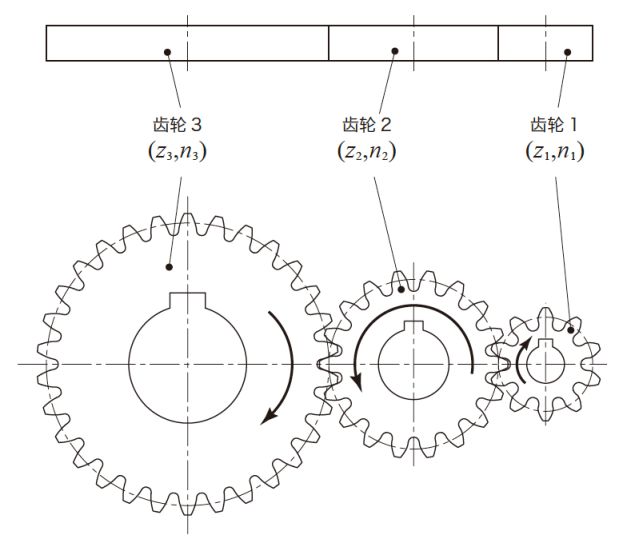
图2.4 使用了惰轮的单级齿轮机构
图2.3 的二级齿轮机构的计算例列于表2.1。
表2.1 二段齿轮机构的传动比| 序 号 | 项 目 | 代 号 | 计 算 式 | 计 算 例 | |
| 小齿轮 | 大齿轮 | ||||
| 1 | 齿数(第一级齿轮) | z1 , z2 | 设定值 | 10 | 24 |
| 2 | 齿数(第二级齿轮) | z3 , z4 | 12 | 30 | |
| 3 | 回转(齿轮1) | n1 | 1200 | – | |
| 4 | 传动比(一级) | i1 | z2 / z1 | 2.4 | |
| 5 | 传动比(二级) | i2 | z4 / z3 | 2.5 | |
| 6 | 传动比 | i | i1 × i2 | 6 | |
| 7 | 转数(齿轮2 及3) | n2 | n1 / i1 | 500 | |
| 8 | 转数(齿轮4) | n4 | n1 / i | – | 200 |